1. TEMA: Resumen de los motores especiales.
2. OBJETIVOS:
· Investigar el funcionamiento, características, ventajas, desventajas, aplicaciones sobre el tipo de motores especiales como brushless, lineal, paso a paso y servomotor.
· Ampliar los conocimientos sobre los motores especiales y sus aplicaciones en la tecnología y empresas de trabajo.
3. DESARROLLO DE LA CONSULTA:
3.1.MOTORES BRUSHLESS.
La palabra brushless se puede traducir como "sin escobillas".
En los motores de DC más pequeños, son de una aleación de cobre y en motores más grandes son de un compuesto a base de carbón.
Estos imanes son atraídos por la polaridad de un campo magnético generado en las bobinas, las cuales como decíamos reciben pulsos en un patrón especifico. Si queremos que el motor gire mas rápido, simplemente hacemos girar el campo magnético secuencial a mayor velocidad. O lo que sería lo mismo a aumentar la frecuencia de los pulsos.


El motor brushless se caracteriza por no tener carbones o escobillas, tienen imanes las cuales son atraídos por un campo magnético generado por las bobinas.
La velocidad varía con respecto a la frecuencia, generalmente estos motores tienen la aplicación en aparatos eléctricos de baja potencia, como lectores de CD-ROM, ventiladores de ordenador, casetes, etc.
Su mecanismo se basa en sustituir la conmutación (cambio de polaridad) mecánica por otra electrónica sin contacto.
3.1.MOTOR LINEAL.
Un motor de inducción lineal es un tipo de motor asíncrono, en el que se ha sustituido el movimiento de rotación de la máquina por uno de traslación, lo cual, le confiere unas peculiares características que lo hacen aplicable a una diversidad de casos prácticos.
Este motor, se puede considerar que se deriva de la máquina convencional, por desarrollo de la misma al cortarle por una generatriz.


Se puede decir que más del 80% de los motores eléctricos industriales, tanto rotativos como lineales, emplean motores asíncronos, trabajando con una frecuencia de alimentación constante. Sin embargo, el inconveniente más grave que poseen, proviene de la dificultad de regular su velocidad, de ahí que en la tracción eléctrica cedan su puesto a los motores de corriente continua que los hace más idóneos para este servicio.
3.1.MOTOR PASO A PASO.
El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control.
El motor paso a paso está constituido esencialmente por dos partes:
a) Una fija llamada "estator", construida a base de cavidades en las que van depositadas las bobinas que excitadas convenientemente formarán los polos norte-sur de forma que se cree un campo magnético giratorio.
b) Una móvil, llamada "rotor" construida mediante un imán permanente, con el mismo número de pares de polos, que el contenido en una sección de la bobina del estator; este conjunto va montado sobre un eje soportado por dos cojinetes que le permiten girar libremente.


Aplicación de un motor paso a paso requiere un cuidadoso estudio. Deben tenerse en cuenta las indicaciones siguientes:
- No se puede lograr una precisión de posicionado mayor que la declarada para el motor funcionando en vacío (normalmente ésta es un 6% del paso).
- Al seleccionar la cupla de retención hay que tener en cuenta que cuando el sistema accionado presenta una fricción importante el rotor no alcanza la posición teórica de reposo.
- La carga debe estar perfectamente definida, y su inercia debe conocerse al menos en forma aproximada
- Hay que tener en cuenta el comportamiento dinámico del conjunto (velocidades de trabajo, aceleración y desaceleración)
- Elegir una fuente de alimentación que pueda suministrar la máxima corriente requerida por el motor con la máxima tensión; ello permite utilizar resistencias extremas de alto valor, que mejoren la constante de tiempo del sistema.
- Elegir incrementos de movimiento del sistema que sean múltiplos exactos del paso del motor. Ello permite obtener la máxima precisión de posicionado y simplifica el problema de control.
-Lograr una adecuada relación entre la inercia del sistema y la propia del rotor.
Generalmente las curvas "cupla -velocidad" se obtienen con dinamómetros cuya inercia no es mayor de dos veces la inercia propia del motor por lo tanto en las aplicaciones prácticas es recomendable aproximarse a dicha relación.
La corriente que requiere depende del tamaño del servo. Normalmente el fabricante indica cual es la corriente que consume. Eso no significa mucho si todos los servos van a estar moviéndose todo el tiempo. La corriente depende principalmente del par, y puede exceder un amperio si el servo está enclavado.
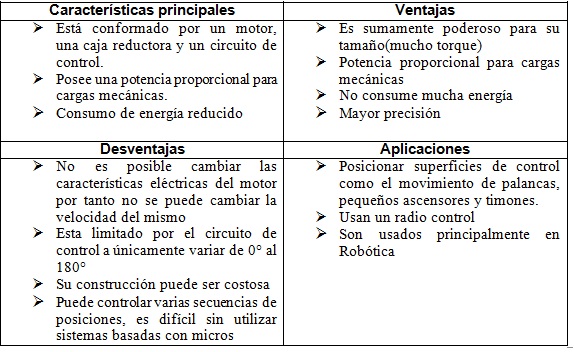
Un servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición. Está conformado por un motor, una caja reductora y un circuito de control.


- El motor brushless se caracteriza por no tener carbones o escobillas, tienen imanes las cuales son atraídos por un campo magnético generado por las bobinas, la velocidad depende de la frecuencia y son utilizados en aparatos electrónicos de baja potencia.
- Se puede decir que más del 80% de los motores eléctricos industriales, tanto rotativos como lineales, emplean motores asíncronos, trabajando con una frecuencia de alimentación constante.
- El motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control, obteniendo mayores valores de aceleración, lo que muchas veces es más importante que el valor de la velocidad máxima.
- Un servomotor es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición generalmente su posición va de 0° hasta 180°.
- La tierra del servo debe concordar con la tierra de la fuente y del sistema que envía las órdenes al servo.
- No utilizar cables demasiado largos para controlar tus servos, es probable que este produzca ruido en los servos, se soluciona utilizando cable blindado, solo recuerda aterrizar el blindaje.
- Un servo en operación normal no se debe de calentar.
(1) Direct Industry (2013). Catalogo Direct Industry .Consultado: [27 de Junio, 2013]. Disponible en: http://www.directindustry.es/fabricante-industrial/motor-electrico-62956-_13.html.
(2) NORMAS ELECTRICA. Consultado: [27 de Junio, 2013]. Disponible en: http://isa.uniovi.es/~vsuarez/Download/MaterialApoyoPracticas/02_03_Elementos_de_proteccion_y_mando.pdf.
(3) Mot La7096 (2007). Catalogo SIEMEMENS .Consultado: [27 de Junio, 2013]. Disponible en:https://sites.google.com/site/279motoreselectricos/partes-fundamentales-de-un-motor-electrico/2-7-eje
(4) Juan Alercio Alamos Hernández (2010). NORMAS ELECTRICA. Consultado: [27 de Junio, 2013]. Disponible en:
http://www.elprisma.com/apuntes/ingenieria_electrica_y_electronica/normaselectricas/%20Ing.%20-%20juan_alamos_h@yahoo.es
(5) Motors 22335-345831 (2007). Catalogo Jhondon Electronic .Consultado: [27 de Junio, 2013]. Disponible en:
http://pdf.directindustry.com/pdf/ge-motors/kinamatic-direct-current-motors/22335-345831.html
(6) Javier Andrés (2011). Motores paso a paso .Consultado: [27 de Junio, 2013]. Disponible en:http://www.monografias.com/trabajos17/motor-paso-a-paso/motor-paso-a-paso.shtml
(7) Stepper (2008). Motores Paso a paso y Principio de Funcionamiento .Consultado: [27 de Junio, 2013]. Disponible en: http://www.docentes.unal.edu.co/hfvelascop/docs/CLASES/DIGITALES2/LABORATORIO/Motor%20Paso%20a%20Paso.pdf
(8) Yanes Erick (2013).Como trucar un servomotor .Consultado: [27 de Junio, 2013]. Disponible:http://es.scribd.com/doc/27909989/Como-trucar-un-servo-HITEC-HS
(9) Miguel Pérez (2007).Servomotor .Consultado: [27 de Junio, 2013]. Disponible:
http://www.slideshare.net/themigue10/servo (10) Encured (2009).Servomotor y sus Aplicaciones .Consultado: [27 de Junio, 2013]. Disponible: http://www.ecured.cu/index.php/Servomotor
DATOS TÉCNICOS
http://www.elprisma.com/apuntes/ingenieria_electrica_y_electronica/normaselectricas/%20Ing.%20-%20juan_alamos_h@yahoo.es
(5) Motors 22335-345831 (2007). Catalogo Jhondon Electronic .Consultado: [27 de Junio, 2013]. Disponible en:
http://pdf.directindustry.com/pdf/ge-motors/kinamatic-direct-current-motors/22335-345831.html
(6) Javier Andrés (2011). Motores paso a paso .Consultado: [27 de Junio, 2013]. Disponible en:http://www.monografias.com/trabajos17/motor-paso-a-paso/motor-paso-a-paso.shtml
(7) Stepper (2008). Motores Paso a paso y Principio de Funcionamiento .Consultado: [27 de Junio, 2013]. Disponible en: http://www.docentes.unal.edu.co/hfvelascop/docs/CLASES/DIGITALES2/LABORATORIO/Motor%20Paso%20a%20Paso.pdf
(8) Yanes Erick (2013).Como trucar un servomotor .Consultado: [27 de Junio, 2013]. Disponible:http://es.scribd.com/doc/27909989/Como-trucar-un-servo-HITEC-HS
(9) Miguel Pérez (2007).Servomotor .Consultado: [27 de Junio, 2013]. Disponible:
http://www.slideshare.net/themigue10/servo (10) Encured (2009).Servomotor y sus Aplicaciones .Consultado: [27 de Junio, 2013]. Disponible: http://www.ecured.cu/index.php/Servomotor
Si deseas descargar la consulta de los motores especiales, los links a continuación:
DATOS TÉCNICOS
Tipo: Consulta Máquinas Eléctricas
Autor: VJ_7
Formato: Microsoft Word
Tamaño: 668 KB


